ドローン/UAVセンサ
製品一覧
-
- 会社名
MAPIR, Inc
- URL
- 販売会社
ケイエルブイ㈱
- 特記事項
画像解像度:12メガピクセル(4,000 x 3,000ピクセル)、8MP 画像フォーマット:RAW+JPG、JPG(RAWは1チャンネルあたり12ビット、JPGは1チャンネルあたり8ビット) ビデオ解像度:2160p24、1440p30、1080p60、720p60 ビデオフォーマット:MP4 (H.264 コーデック) USBストリーミング:1920x1440、30fps(H.264) レンズ光学系:87° HFOV (19mm) f/2.8 絞り、-1% 超低歪み (非魚眼) ガラスレンズ フィルター透過率:NGB(NIR+緑+青):475nm/550nm/850nm(データダウンロード) 反射率校正 キャリブレーション ターゲットの写真を使用した、チャネル分離と反射率のキャリブレーション 地上サンプル距離(GSD):地上120メートル(約400フィート)で5.5cm/ピクセル(2.17インチ/ピクセル) センサー:ソニー Exmor R IMX117 12MP (ベイヤー RGB) チップセット:ノバテック NTK96663 GPS/GNSS (外部):標準: u-blox UBX-G7020-KT、アドバンスドV2: u-blox M10
- 会社名
-
- 会社名
MAPIR, Inc
- URL
- 販売会社
ケイエルブイ㈱
- 特記事項
画像解像度:12メガピクセル(4,000 x 3,000ピクセル)、8MP 画像フォーマット:RAW+JPG、JPG(RAWは1チャンネルあたり12ビット、JPGは1チャンネルあたり8ビット) ビデオ解像度:2160p24、1440p30、1080p60、720p60 ビデオフォーマット:MP4 (H.264 コーデック) USBストリーミング:1920x1440、30fps(H.264) レンズ光学系:87° HFOV (19mm) f/2.8 絞り、-1% 超低歪み (非魚眼) ガラスレンズ フィルター透過率:RGN(赤+緑+近赤外線):550nm/660nm/850nm(データダウンロード) 反射率校正 キャリブレーション ターゲットの写真を使用した、チャネル分離と反射率のキャリブレーション 地上サンプル距離(GSD):地上120メートル(約400フィート)で5.5cm/ピクセル(2.17インチ/ピクセル) センサー:ソニー Exmor R IMX117 12MP (ベイヤー RGB) チップセット:ノバテック NTK96663 GPS/GNSS (外部) :標準: u-blox UBX-G7020-KT、アドバンスドV2: u-blox M10
- 会社名
-
- 会社名
MAPIR, Inc
- URL
- 販売会社
ケイエルブイ㈱
- 特記事項
画像解像度:12メガピクセル(4,000 x 3,000ピクセル)、8MP 画像フォーマット:RAW+JPG、JPG(RAWは1チャンネルあたり12ビット、JPGは1チャンネルあたり8ビット) ビデオ解像度:2160p24、1440p30、1080p60、720p60 ビデオフォーマット:MP4 (H.264 コーデック) USBストリーミング:1920x1440、30fps(H.264) レンズ光学系:87° HFOV (19mm) f/2.8 絞り、-1% 超低歪み (非魚眼) ガラスレンズ フィルター透過率:OCN(オレンジ+シアン+NIR):490nm/615nm/808nm(データダウンロード) 反射率校正:キャリブレーション ターゲットの写真を使用した、チャネル分離と反射率のキャリブレーション 地上サンプル距離(GSD):地上120メートル(約400フィート)で5.5cm/ピクセル(2.17インチ/ピクセル) センサー:ソニー Exmor R IMX117 12MP (ベイヤー RGB) チップセット:ノバテック NTK96663 GPS/GNSS (外部):標準: u-blox UBX-G7020-KT、アドバンスドV2: u-blox M10"
- 会社名
-
- 会社名
MAPIR, Inc
- URL
- 販売会社
ケイエルブイ㈱
- 特記事項
画像解像度:12メガピクセル(4,000 x 3,000ピクセル)、8MP 画像フォーマット:RAW+JPG、JPG(RAWは1チャンネルあたり12ビット、JPGは1チャンネルあたり8ビット) ビデオ解像度:2160p24、1440p30、1080p60、720p60 ビデオフォーマット:MP4 (H.264 コーデック) USBストリーミング:1920x1440、30fps(H.264) レンズ光学系:87° HFOV (19mm) f/2.8 絞り、-1% 超低歪み (非魚眼) ガラスレンズ フィルター透過率:可視光(RGB):375nm - 650nm 自動ホワイトバランス:キャリブレーション ターゲットの写真を使用して、MCC ソフトウェアで自動的にホワイト バランスを調整します 。 地上サンプル距離(GSD):地上120メートル(約400フィート)で5.5cm/ピクセル(2.17インチ/ピクセル) センサー:ソニー Exmor R IMX117 12MP (ベイヤー RGB) チップセット:ノバテック NTK96663 GPS/GNSS (外部):標準: u-blox UBX-G7020-KT、アドバンスドV2: u-blox M10
- 会社名
-
- 会社名
中日本航空㈱
- URL
- 特記事項
計測システム Riegl製 VUX-SYS ■ 視野角(FOV):330° ■ アイセーフクラス:レーザークラス1 ■ 有効測定レート:500,000測定/秒まで ■ スキャナ重量:約3.85kg CHCNACV製 AA10 ■ 視野角(FOV):72° ■ アイセーフクラス:レーザークラス1 ■ 有効測定レート:500,000測定/秒まで ■ スキャナ重量:約1.55kg
- 会社名
-
- 会社名
DFROBOT
- URL
- 特記事項
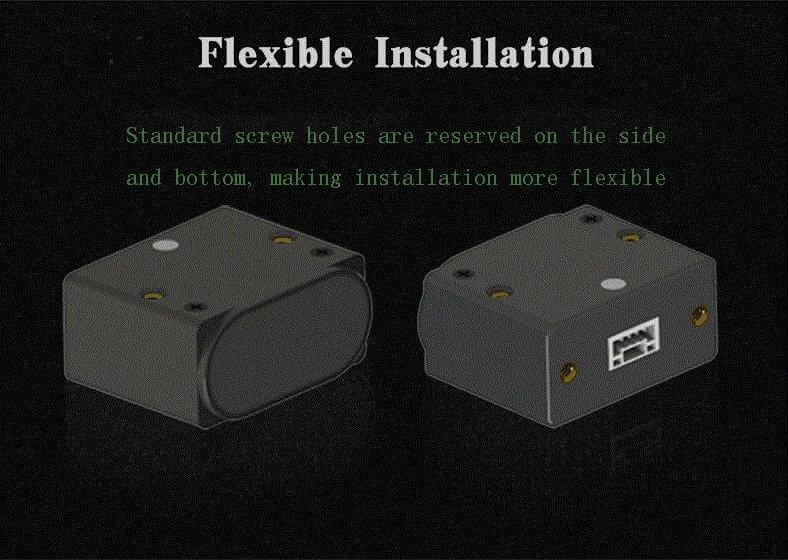
5cm~15mの測定範囲、1mmの解像度、100Kルクスの耐光性を備えたコンパクトな屋外用レーザーセンサ 測定範囲:5cm~15m 測定解像度:1mm 測距精度: [0.05m、2m]±2cm、標準偏差<0.5cm; (2m、15m]±2%、標準偏差<8cm 視野角(FOV):1~2° 出力モード: UART、I2C、I/O (UART モードでアクティブ出力とクエリ出力をサポート) リフレッシュレート: 50Hz I2C デフォルトスレーブアドレス: 0x08 波長: 750~830nm アンチアンビエントライト:100Kルクス
- 会社名
-
- 会社名
リーグルジャパン㈱
- URL
- 特記事項
miniVUXシリーズ搭載 コンプリートLiDARシステム ・RIEGL miniVUXシリーズ搭載 LiDARシステム ・高精度なインテグレーションセッティング&キャリブレーション済 ・中型・大型ドローンへの取付けキット(オプション) ・DJI M350 RTKへの取付けキット(オプション) ・カメラシステム搭載(オプション) ・RIEGLソフトウェアパッケージによるスムーズなデータ処理 ・1年間の保険が付属
- 会社名
-
- 会社名
リーグルジャパン㈱
- URL
- 特記事項
VUXシリーズ搭載 ハイエンドLiDARシステム ・レーザースキャナーVUX-1にIMU/GNSSシステムがフルインテグレートされたシステム ・ハイスペックなセンサー同士の組み合わせによるハイエンドUAVレーザー計測ユニット ・カラー点群生成用に最大2個までのデジタルカメラをコントロール(オプション) ・様々なUAVに搭載しやすいシステム構成 ・RIEGLソフトウェアパッケージによるスムーズなデータ処理 ・UAV以外の移動体プラットフォームにも搭載可能 ・1年間の保険が付属
- 会社名
-
- 会社名
リーグルジャパン㈱
- URL
- 特記事項
UAVグリーンレーザースキャニングシステム レーザースキャナーとIMU/GNSSがインテグレートされた水面下の地形計測を目的としたグリーンレーザースキャニングシステム ・水面下の地形、陸上の地形ともに計測可能なUAVまたは有人機搭載LiDARとしての設計 ・エコーのデジタル化とマルチターゲット測定機能を備えたオンライン波形分析に基づく高精度な測距 ・最大200kHzの測定レートと最大100スキャン/秒のスキャンレートによる高い空間分解能 ・RGBカメラのインテグレート ・標準的な測深能力 2Secchi Depth ・プロジェクトにあわせたビーム広がり角、受信FOVの設定変更が可能
- 会社名
-
- 会社名
リーグルジャパン㈱
- URL
- 特記事項
UAVグリーンレーザーシステム レーザースキャナーとIMU/GNSSがインテグレートされた水面下の地形計測を目的としたグリーンレーザースキャニングシステム ・水面下の地形、陸上の地形ともに計測可能なUAVまたは有人機搭載LiDARとしての設計 ・エコーのデジタル化とマルチターゲット測定機能を備えたオンライン波形分析に基づく高精度な測距 ・最大200kHzの測定レートと最大100スキャン/秒のスキャンレートによる高い空間分解能 ・RGBカメラのインテグレート ・標準的な測深能力 2Secchi Depth ・プロジェクトにあわせたビーム広がり角、受信FOVの設定変更が可能
- 会社名